0388724758
Tiếng Việt (VND)



L298P Mạch Điều Khiển Động Cơ 4A Arduino
Thương hiệu
ArduinoMã khách hàng
Mô tả
Nguồn: 5~12VDC, dòng: 2A/kênh, 4A(max)
Hết hàng
(Đặt mua để có hàng sớm)
Min: 1
Bội số: 1
Đơn vị bán: Cái
| Số lượng | Đơn giá | Thành tiền |
| 1+ | 181,000 đ | 181,000 đ |
| 10+ | 180,000 đ | 1,800,000 đ |
| 20+ | 179,000 đ | 3,580,000 đ |
Thông số kỹ thuật
| Thuộc tính | Giá trị | Tìm kiếm |
|---|---|---|
| Danh mục | Shield Điều Khiển Động Cơ | |
| RoHS | ||
0 Sản phẩm tương tự | ||
| Thuộc tính | Giá trị | Tìm kiếm |
|---|---|---|
| Danh mục | Shield Điều Khiển Động Cơ | |
| RoHS | ||
0 Sản phẩm tương tự | ||
Phản hồi (0)
Hết hàng
(Đặt mua để có hàng sớm)
Min: 1
Bội số: 1
Đơn giá
181,000 đ
Thành tiền
181,000 đ
Đơn vị bán: Cái
| Số lượng | Đơn giá | Thành tiền |
|---|---|---|
| 1+ | 181,000 đ | 181,000 đ |
| 10+ | 180,000 đ | 1,800,000 đ |
| 20+ | 179,000 đ | 3,580,000 đ |
- Copy thành công
| Số lượng | Đơn giá | Thành tiền |
| 1+ | 181,000 đ | 181,000 đ |
| 10+ | 180,000 đ | 1,800,000 đ |
| 20+ | 179,000 đ | 3,580,000 đ |
Thông số kỹ thuật
| Thuộc tính | Giá trị | Tìm kiếm |
|---|---|---|
| Danh mục | Shield Điều Khiển Động Cơ | |
| RoHS | ||
0 Sản phẩm tương tự | ||
| Thuộc tính | Giá trị | Tìm kiếm |
|---|---|---|
| Danh mục | Shield Điều Khiển Động Cơ | |
| RoHS | ||
0 Sản phẩm tương tự | ||
Mô tả sản phẩm
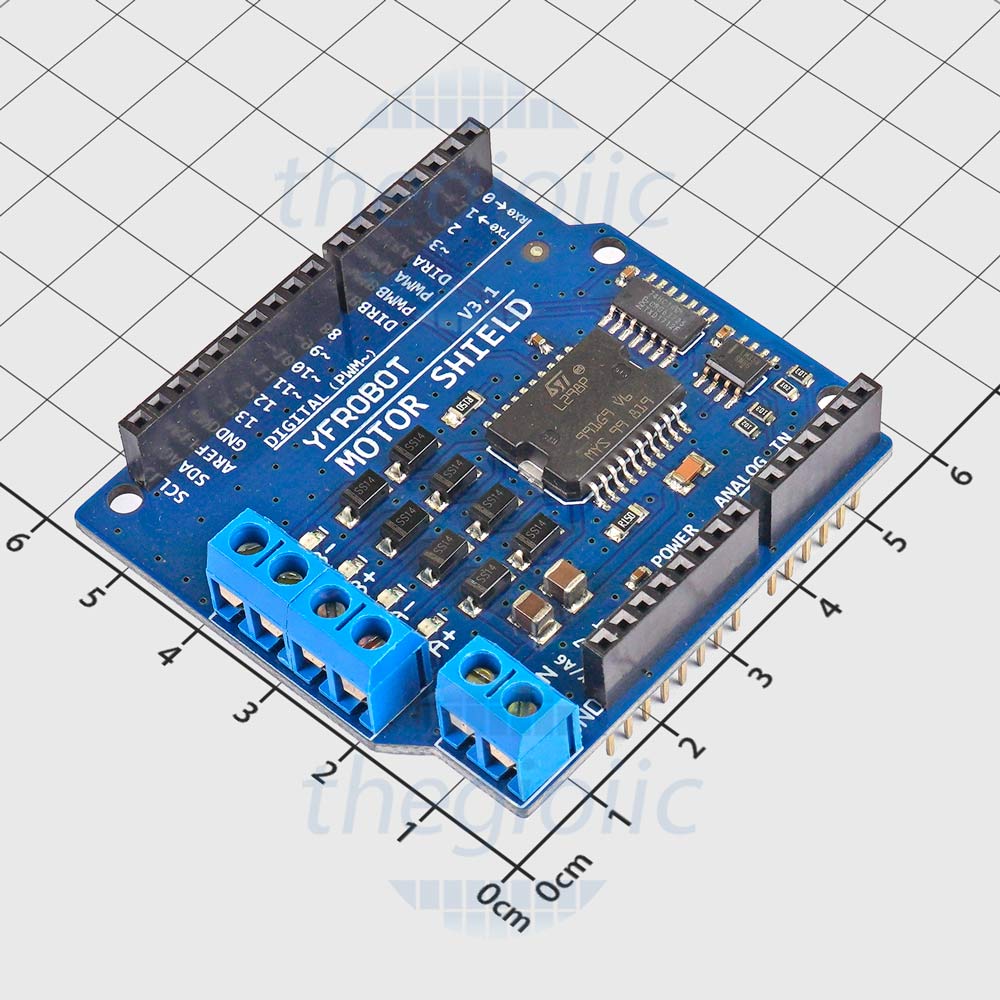
Mạch "L298P-V1 Motor Shield Arduino" cho phép điều khiển động cơ DC và động cơ bước. Bạn có thể điều khiển hai động cơ DC với mạch Arduino của bạn, điều khiển tốc độ và hướng quay của mỗi động cơ một cách độc lập. Bạn cũng có thể đo mức độ tiêu thụ dòng điện của mỗi động cơ.
Thông số kỹ thuật:
- Điện áp hoạt động: 5~12 VDC
- Điều khiển: 2 động cơ DC hoặc 1 động cơ bước
- Dòng điện tối đa: 2A trên mỗi kênh
- Kích thước: 6.9 x 5.33 cm.
Lưu ý: Sản phẩm không được bảo hành. Quý khách vui lòng tham khảo Quy định bảo hành và Quy định đổi trả hàng
Sơ đồ thiết kế:
- EAGLE files:arduino_MotorShield_Rev3-reference-design.zip
- Schematic: arduino_MotorShield_Rev3-schematic.pdf
Thông tin:
- "L298P-V1 Motor Shield Arduino" phải được cấp nguồn bằng nguồn điện ngoài. Bởi vì ic L298 gắn trên module cần hai nguồn riêng biệt, một cho ic L298 và một cho động cơ. Dòng động cơ yêu cầu thường vượt quá mức cho phép của cổng USB.
- Nguồn ngoài (không phải USB) có thể đến từ bộ chuyển đổi AC-to-DC hoặc pin. Nguồn ngoài có thể được kết nối bằng cách cắm trực tiếp vào giắc cắm nguồn của bo mạch Arduino khi L298P-V1 Motor Shield Arduino được cắm trên Arduino
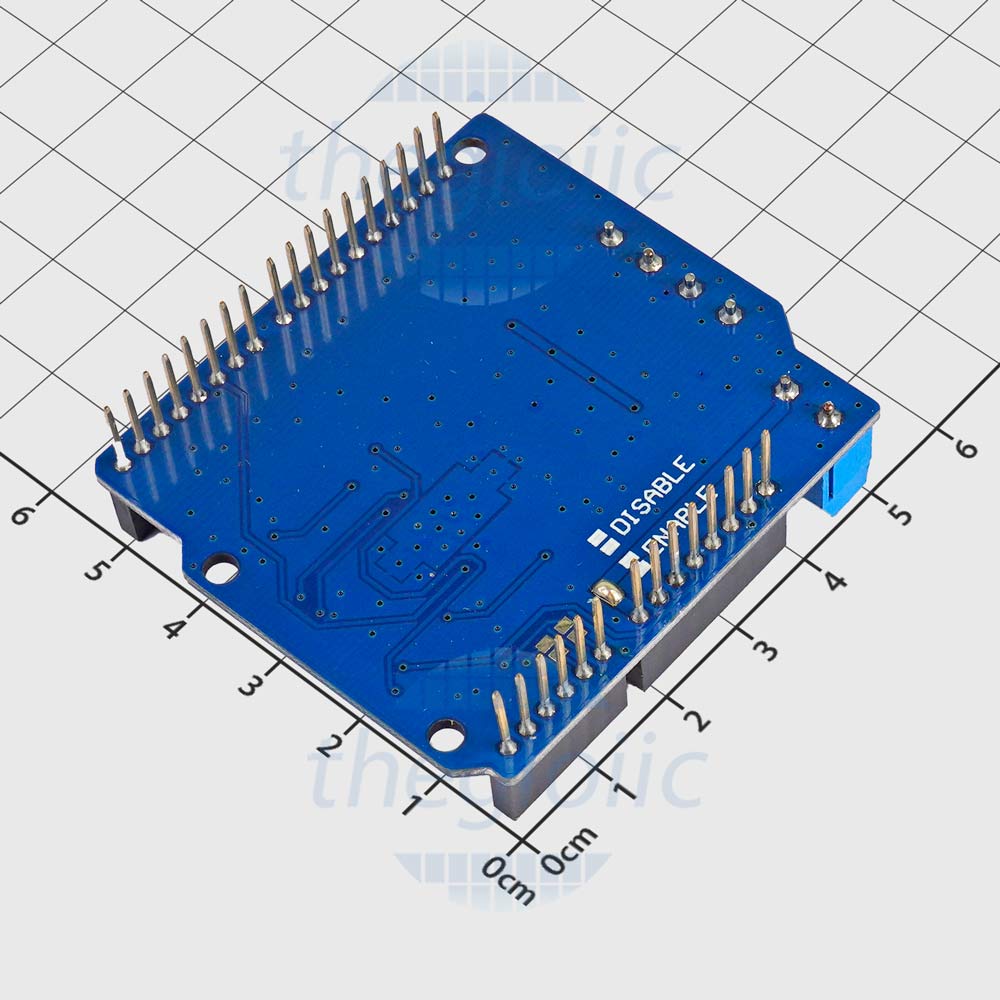
- Để tránh thiệt hại có thể xảy ra với mạch Arduino của bạn, chúng tôi khuyên bạn nên sử dụng nguồn điện bên ngoài cung cấp điện áp từ 7 đến 12 VDC. Nếu động cơ của bạn yêu cầu nhiều hơn 9V, chúng tôi khuyên bạn nên tách riêng các đường dây nguồn của "L298P-V1 Motor Shield Arduino" và Arduino. Điều này có thể thực hiện bằng cách tháo jumper ở mặt sau của "L298P-V1 Motor Shield Arduino".
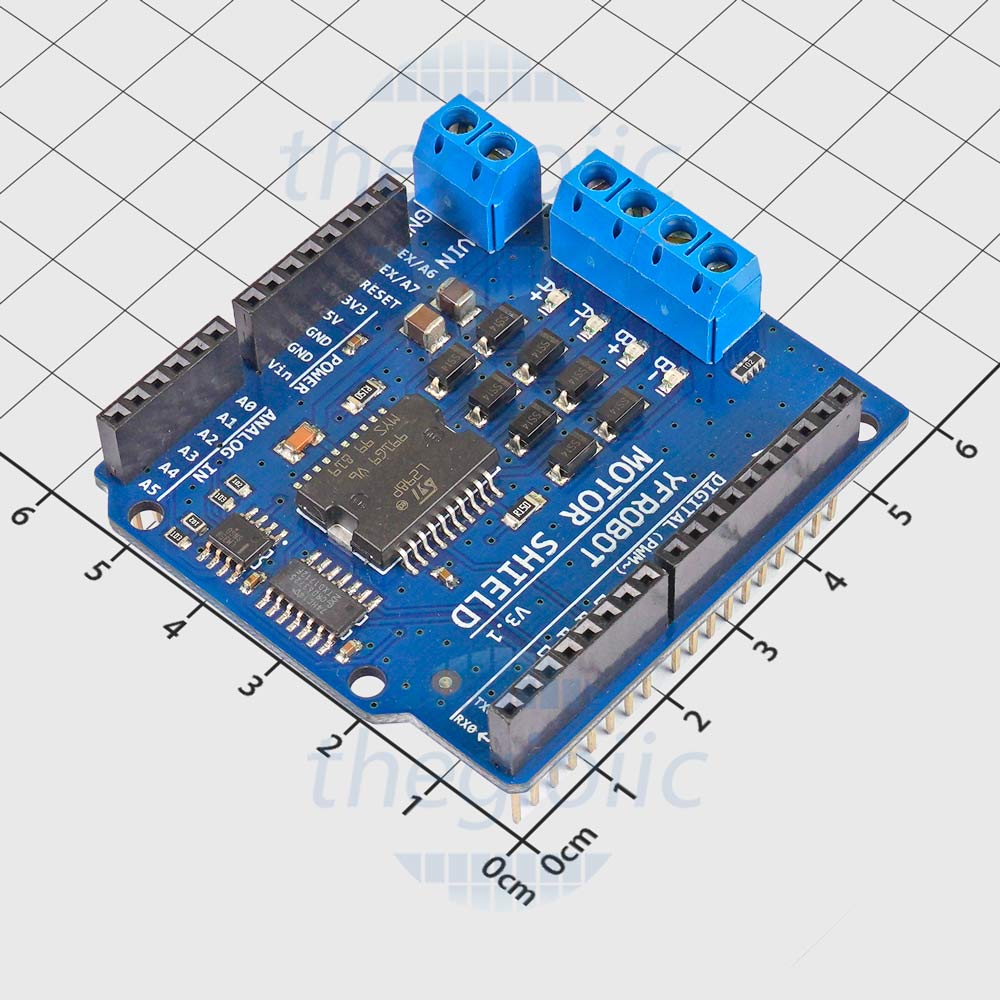
Các chân nguồn như sau:
- Vin: là chân nguồn cung cấp cho động cơ
- GND: nối mass
Board có thể cung cấp 2 ampere trên mỗi kênh.
Đầu vào và đầu ra
Thiết bị này có hai kênh riêng biệt, được gọi là A và B, mỗi kênh sử dụng 4 chân Arduino để điều khiển. Tổng cộng có 8 chân được sử dụng trên thiết bị này. Bạn có thể sử dụng từng kênh riêng biệt để điều khiển hai động cơ DC hoặc kết hợp chúng để điều khiển một động cơ bước hai cực.
Các chân của thiết bị,
- Chân điều khiển hướng quay D12 D13
- Chân PWM D3 D11
- Chân phanh D9 D8
- Chân cảm biến A0 A1
Nếu bạn không cần phanh và bạn cũng cần nhiều chân hơn cho ứng dụng của mình, bạn có thể tắt tính năng này bằng cách tháo các jumper tương ứng ở mặt sau của thiết bị.
Các đầu nối bổ sung trên thiết bị được mô tả như sau: 2 nguồn đầu vào
- 2 đầu nối cho hai đầu vào Aanlog (màu trắng), được kết nối với A2 và A3.
- 2 đầu nối cho hai đầu ra Aanlog (màu cam ở giữa), được kết nối với đầu ra PWM trên chân D5 và D6.
- 2 đầu nối cho giao diện TWI (màu trắng với 4 chân), một cho đầu vào và đầu kia cho đầu ra.
Kết nối động cơ: Bạn có thể điều khiển hai động cơ Brushed DC bằng cách kết nối hai dây của động cơ với đầu (+) và (-) trên kênh A và B. bạn có thể kiểm soát tốc độ bằng cách thay đổi giá trị chu kỳ nhiệm vụ PWM A và PWM B. Các chân phanh A và phanh B, nếu đặt HIGH, sẽ phanh động cơ DC hiệu quả hơn là để chúng hoạt động chậm lại bằng cách cắt điện. Bạn có thể đo dòng điện chạy qua động cơ DC bằng cách đọc các chân SNS0 và SNS1. Trên mỗi kênh sẽ là một điện áp tỷ lệ thuận với dòng đo được, có thể được đọc như một đầu vào analog bình thường, thông qua chức năng analogRead () trên đầu vào analog A0 và A1.
Mạch "L298P-V1 Motor Shield Arduino" cho phép điều khiển động cơ DC và động cơ bước. Bạn có thể điều khiển hai động cơ DC với mạch Arduino của bạn, điều khiển tốc độ và hướng quay của mỗi động cơ một cách độc lập. Bạn cũng có thể đo mức độ tiêu thụ dòng điện của mỗi động cơ.
Thông số kỹ thuật:
- Điện áp hoạt động: 5~12 VDC
- Điều khiển: 2 động cơ DC hoặc 1 động cơ bước
- Dòng điện tối đa: 2A trên mỗi kênh
- Kích thước: 6.9 x 5.33 cm.
Lưu ý: Sản phẩm không được bảo hành. Quý khách vui lòng tham khảo Quy định bảo hành và Quy định đổi trả hàng
Sơ đồ thiết kế:
- EAGLE files:arduino_MotorShield_Rev3-reference-design.zip
- Schematic: arduino_MotorShield_Rev3-schematic.pdf
Thông tin:
- "L298P-V1 Motor Shield Arduino" phải được cấp nguồn bằng nguồn điện ngoài. Bởi vì ic L298 gắn trên module cần hai nguồn riêng biệt, một cho ic L298 và một cho động cơ. Dòng động cơ yêu cầu thường vượt quá mức cho phép của cổng USB.
- Nguồn ngoài (không phải USB) có thể đến từ bộ chuyển đổi AC-to-DC hoặc pin. Nguồn ngoài có thể được kết nối bằng cách cắm trực tiếp vào giắc cắm nguồn của bo mạch Arduino khi L298P-V1 Motor Shield Arduino được cắm trên Arduino
- Để tránh thiệt hại có thể xảy ra với mạch Arduino của bạn, chúng tôi khuyên bạn nên sử dụng nguồn điện bên ngoài cung cấp điện áp từ 7 đến 12 VDC. Nếu động cơ của bạn yêu cầu nhiều hơn 9V, chúng tôi khuyên bạn nên tách riêng các đường dây nguồn của "L298P-V1 Motor Shield Arduino" và Arduino. Điều này có thể thực hiện bằng cách tháo jumper ở mặt sau của "L298P-V1 Motor Shield Arduino".
Các chân nguồn như sau:
- Vin: là chân nguồn cung cấp cho động cơ
- GND: nối mass
Board có thể cung cấp 2 ampere trên mỗi kênh.
Đầu vào và đầu ra
Thiết bị này có hai kênh riêng biệt, được gọi là A và B, mỗi kênh sử dụng 4 chân Arduino để điều khiển. Tổng cộng có 8 chân được sử dụng trên thiết bị này. Bạn có thể sử dụng từng kênh riêng biệt để điều khiển hai động cơ DC hoặc kết hợp chúng để điều khiển một động cơ bước hai cực.
Các chân của thiết bị,
- Chân điều khiển hướng quay D12 D13
- Chân PWM D3 D11
- Chân phanh D9 D8
- Chân cảm biến A0 A1
Nếu bạn không cần phanh và bạn cũng cần nhiều chân hơn cho ứng dụng của mình, bạn có thể tắt tính năng này bằng cách tháo các jumper tương ứng ở mặt sau của thiết bị.
Các đầu nối bổ sung trên thiết bị được mô tả như sau: 2 nguồn đầu vào
- 2 đầu nối cho hai đầu vào Aanlog (màu trắng), được kết nối với A2 và A3.
- 2 đầu nối cho hai đầu ra Aanlog (màu cam ở giữa), được kết nối với đầu ra PWM trên chân D5 và D6.
- 2 đầu nối cho giao diện TWI (màu trắng với 4 chân), một cho đầu vào và đầu kia cho đầu ra.
Kết nối động cơ: Bạn có thể điều khiển hai động cơ Brushed DC bằng cách kết nối hai dây của động cơ với đầu (+) và (-) trên kênh A và B. bạn có thể kiểm soát tốc độ bằng cách thay đổi giá trị chu kỳ nhiệm vụ PWM A và PWM B. Các chân phanh A và phanh B, nếu đặt HIGH, sẽ phanh động cơ DC hiệu quả hơn là để chúng hoạt động chậm lại bằng cách cắt điện. Bạn có thể đo dòng điện chạy qua động cơ DC bằng cách đọc các chân SNS0 và SNS1. Trên mỗi kênh sẽ là một điện áp tỷ lệ thuận với dòng đo được, có thể được đọc như một đầu vào analog bình thường, thông qua chức năng analogRead () trên đầu vào analog A0 và A1.
Phản hồi (0)

Chấp nhận thanh toán





